|
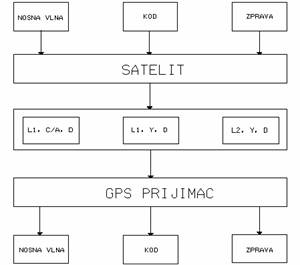
signál GPS | dráha satelitu | struktura signálu | složky signálu | nosné vlny L1 a L2 pseudonáhodný kód PRN | navigační zpráva | zpracování signálu ************************************************************************ 1. Navigační systém GPS GPS představuje revoluční technologii v určování pozice a měření Země. Jedna záležitost této technologie je otázka přesnosti, další se týkají rychlosti a jednoduchosti. V neposlední řadě je důležitá cena. Všechny z těchto zlepšení přispívají ke stále větší oblibě této významné, nejen geodetické, aplikace.
Důležitá výhoda GPS : přesnost. „Přirozená“ přesnost GPS přijímače může být beze zbytku využita nebo naopak degradována. Zvýšena pečlivým zpracováním, degradována akceptováním významných zdrojů chyb (místo pokusu o jejich eliminaci). Následující seznam obsahuje tři kritické techniky jako důkaz centimetrové nebo dokonce milimetrové přesnosti v určení polohy :
1 Práce s dvěma či více přijímači. Základní idea diferenciálního GPS (DGPS) je určit rozdíly v poloze místo určení polohy absolutní. Chyby způsobené přijímači se vyloučí, pokud použijeme metodu diferencí. 2 Opakovat měření. Sekvence observací mají významně menší rozptyl než observace jednotlivé. Jestliže se přijímač pohybuje, Kalmanův filtr může vysvětlit změny stavů stejně jako nové observace. 3 Odhad všech zdrojů chyb v provedených observacích.
Čtenář jistě zná problém kolísání družicových hodin. Prezident Clinton určil, že armáda by měla ukončit tuto „Výběrovou dostupnost“ (Selective Availability – S/A, SA, S–A) před rokem 2006. Všechny ukazatele jsou příznivé; neměli bychom být překvapeni, pokud k tomu dojde dříve. 2–dimenzionální rms polohová chyba z tohoto zdroje může být blízko 100 metrům (a je odstraněna DGPS, když 2 přijímače měří svůj signál ze stejného satelitu).
Silný důraz je třeba klást na důležitost času. V aplikacích GPS je čas třeba chápat jako 4 dimenzi. To je důvod, proč potřebujeme alespoň čtyři satelity, nikoliv tři, pro lokaci přijímače. Čtyři souřadnice budou spočteny, a to x, y, z a c . dt – rychlost světla vynásobená chybou hodin přijímače. Veličina c . dt má jednotky dle vzdálenosti. Protože hodiny běžného přijímače znají čas již během několika sekund, eliminace chyby vlivem c . dt není nepovinná – je absolutně vyžadována!
V krátkosti : Klíč k přesnosti GPS je v přesných znalostech dráhy satelitu a času. V pozemním středisku jsou spočteny Keplerovy elementy dle aktuálně zjištěných parametrů dráhy družice (každý soubor přibližných Keplerových elementů je spolehlivý po 2 hodiny) a tyto elementy jsou nahrány do paměti družice. Na satelitu jsou umístěny atomové hodiny (césiové či rubudiové – viz. Tab. 5.9. na konci referátu). Družice vysílají svoje vlastní přibližné Keplerovy elementy pro výpočet pozice v přijímači. Taktéž vysílají s nižší přesností (uvedeny v almanachu) Keplerovy elementy pro ostatní satelity.
Jeden základní fakt o GPS zasluhuje pozornost. Měření GPS poskytuje vzdálenost, nikoliv úhly. Zabýváme se tedy trilaterací a ne triangulací. Toto bylo přáním po staletí, poněvadž úhly jsou určitě méně výhodné. Samozřejmě, že průběh vzdálenosti není lineární, proto musí přijímač řešit nelineární rovnice.
GPS satelity vysílají na dvou nosných frekvencích (L – pásmo): 1575,42 MHz (L1) a 1227,60 MHz (L2).
V případě pohybu zdroje či
přijímače, přijmutá frekvence je Dopplerovsky posunuta. To znamená, že
přijmutá frekvence fr se od vyslané frekvence fe
liší o hodnotu Df , která,
nehledě na relativistické efekty, je úměrná radiální rychlosti zdroje
protože satelity GPS obíhají se střední rychlostí
Pozn. : L pásmo zahrnuje frekvence od 1,0 GHz od 2,0 GHz v UHF rozsahu decimetrových radarových vln.
GPS satelity vysílají na dvou nosných frekvencích (L – pásmo): 1575,42 MHz (L1) a 1227,60 MHz (L2). Obě frekvence mají rozdílný čas průchodu ionosférou. Každá nosná vlna je fázově modulována přesným P – kódem, sestávajícím se z pseudonáhodných bitových sekvencí při rychlosti přenosu 10,23 Mb/s. Krom toho, nosná vlna L1 je modulována v kvadratuře (např. přesazením o 90o) s 1,023 Mb/s pseudonáhodných bitových sekvencí, používaných pro hrubý sběr dat (tedy C/A kód). Čas vyslání signálu (dle palubních hodin satelitu) je přesně znám pro každý bit v dané sekvenci. GPS přijímač identifikuje příchozí bity a zjistí čas přijmutí signálu (dle hodin přijímače) s přesností lepší než 1% z délky bitu (kolem 1 nsec nebo 30 cm pro P – kód). Pravděpodobné (apriorní) pozice družic GPS a časové posuny mezi GPS satelity jsou vysílány k uživateli spolu s ostatními informacemi na 50 bps datové zprávě namudolované na nosné vlně L1 i L2. Rozdíl mezi známým časem odeslání a observovaným časem přijmutí dává měřenou vzdálenost mezi satelitem a přijímačem. V měřené vzdálenosti se ovšem projeví chyba hodin (synchronizace) mezi hodinami palubními a GPS přijímače, její velikost pak označujeme jako „pseudovzdálenost“. Přijímač simultánně měří pseudovzdálenost na 5 satelitů, čímž může přibližně určit svoji pozici a časový posun oproti GPS času, typicky s přesností 10 – 15 metrů a < 1 mikrosekunda. Moderní přijímače umožňují též měřit a udržovat souvislý příjem nosné fáze s přesností lepší než 0,5% vlnové délky (» 1 mm).
Z důvodu národní bezpečnosti se politika vlády USA snaží o limitování přístupu do Precision Positioning Service (PPS) a přesnosti Standard Positioning Service (SPS). Dvě technologie jsou používány k omezení přístupu a přesnosti GPS : Výběrová Dosažitelnost (Selective Availability – S/A) a/nebo Anti Spoofing (A/S). A/S je proces, používaný k odmítnutí uživatelského přístupu pro plné využití systému vysokým stupněm šifrování P – kódu, který je normálně vyžadován pro přesná měření. Když dojde k zašifrování, P – kód je nahrazen „Y – kódem“. Jestliže uživatel nemá požadovaný „dešifrovací klíč“ k určení Y – kódu, pak tento uživatel nemá přístup do PPS. S/A záměrně způsobí malou náhodnou chybu ve vysílaných efemeridách v almanachu (je součástí navigační zprávy v pátém datovém podúseku na stranách 1 až 24) a v nosné vlně a/nebo ve vysílané frekvenci. S/A tedy může zapříčinit chybu v pozici řádově kolem 100 metrů.
Pro GPS/MET je nutný přístup k nejvyšší dosažitelné přesnosti z GPS. Nicméně, „přijímač Y – kódu“ a dešifrovací klíč nejsou potřebné. Místo toho je používán „obyčejný přijímač“, schopný přijímat nosnou vlnu L2 bez explicitní znalosti Y – kódu. S ohledem na S/A, UNAVCO studie ukázala, že při použití Dvojitého Diferencování (Double Differencing) ve spojení se synchronizovanými hodinami přijímače je S/A efektivně eliminováno, zrovna tak, chyba hodin přijímače a chyby orbitální. S ohledem na tuto skutečnost, A/S a S/A nezavádí žádné nepřekonatelné omezení pro uživatele GPS.
Pseudonáhodný kód PRN (PseudoRandom Noise)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||